|
I'm currently working as a Tech Lead at Huawei IAS BU, leading a team working on Prediction & ML Planning. I stepped on this journey towards Autonomous Driving in my Ph.D. study. Starting with injecting traditional planning ideas into learning-based methods, I have been exploring the way for planning-prediction-coupled framework, data-driven decision-making, deep-learning-based planning, and further more. CV / Email / Google Scholar / Github |
|
|
I received the Ph.D. degree from Robotics Institute, Hong Kong University of Science and Technology in 2021, where I worked on robotics, autonomous driving, and deep learning under the supervision of Prof. Qifeng Chen and Prof. Michael Yu Wang. I was a visiting scholar at the Robotics, Perception and Learning Lab, KTH Royal Institute of Technology in 2018, working with Prof. Kaiyu Hang and Prof. Danica Kragic. Before that, I obtained the Bachelor degree in Flight Vehicle Design and Engineering from Harbin Institute of Technology in 2016. My first-authored publications are listed below. |
|
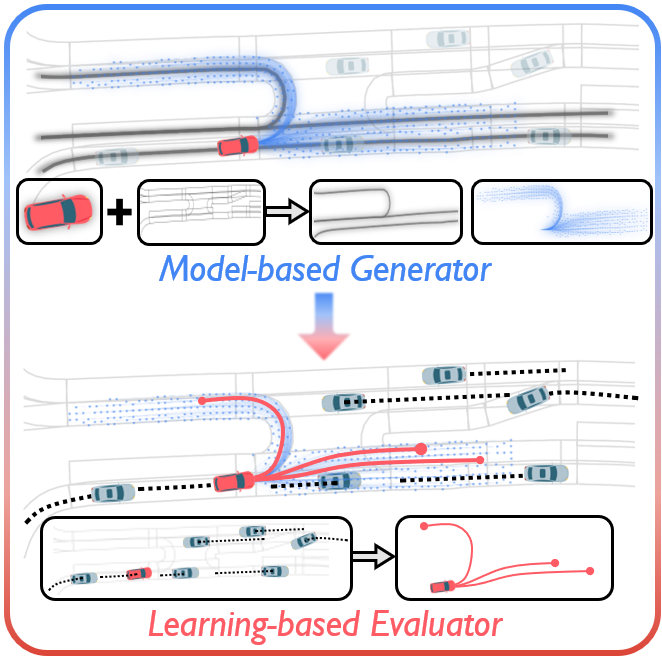
Haoran Song, Di Luan, Wenchao Ding, Michael Yu Wang, Qifeng Chen Conference on Robot Learning (CoRL 2021), London, UK Ranked 1st on the Argoverse Motion Forecasting Leaderboard by March 2021
|
|
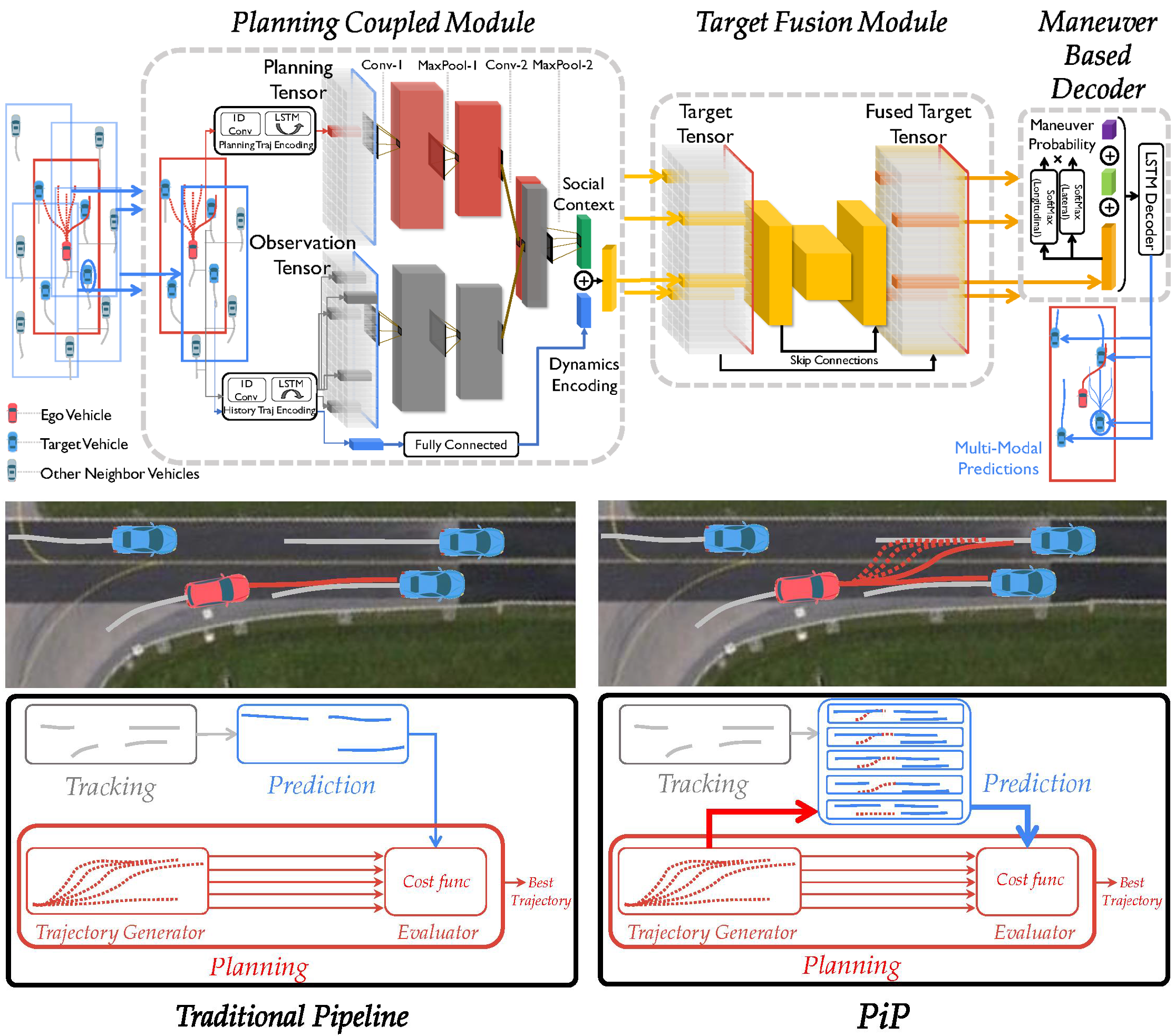
Haoran Song, Wenchao Ding, Yuxuan Chen, Shaojie Shen, Michael Yu Wang, Qifeng Chen European Conference on Computer Vision (ECCV 2020), Glasgow, Scotland, UK
|
|
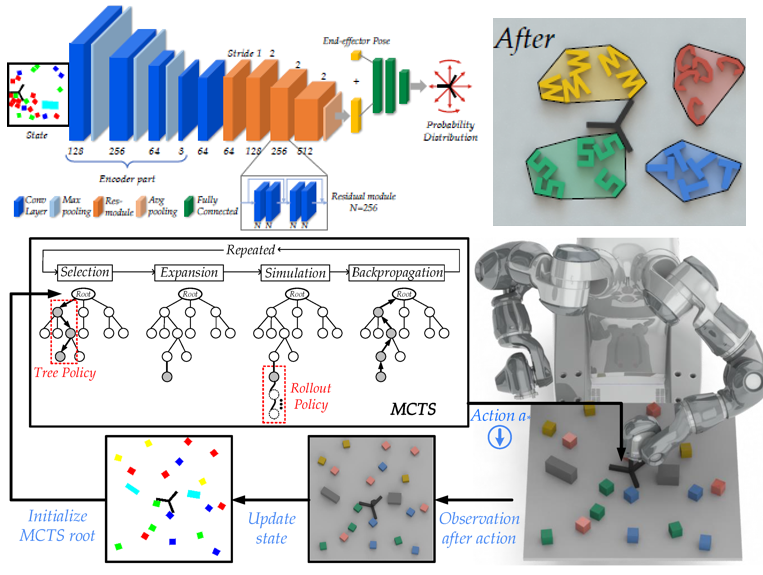
Haoran Song*, Joshua A. Haustein*, Weihao Yuan, Kaiyu Hang, Michael Yu Wang, Danica Kragic, Johannes A. Stork IEEE International Conference on Intelligent Robots and Systems (IROS 2020), Las Vegas, USA
|
|
Haoran Song*, Anastasiia Varava*, Oleksandr Kravchenko, Danica Kragic, Michael Yu Wang, Florian T. Pokorny, Kaiyu Hang Autonomous Robots (AURO), 2021
|
|
Kaiyu Hang*, Ximin Lyu*, Haoran Song*, Johannes A Stork*, Aaron M Dollar, Danica Kragic, Fu Zhang (* denotes equal contribution) Science Robotics, 2019 Cover article
|
|
Haoran Song, Michael Yu Wang, Kaiyu Hang IEEE Robotics and Automation Letters (RA-L), 2018 & IEEE International Conference on Robotics and Automation (ICRA 2018), Brisbane, Australia
|
|
These include other projects and issued patents. |
|
Weihao Yuan, Kaiyu Hang, Haoran Song, Danica Kragic, Michael Y. Wang, Johannes A. Stork IEEE International Conference on Robotics and Automation (ICRA 2019), Montreal, Canada |
|
Kaiyu Hang, Haoran Song US Patent App. 16/192,169, 2019 |
|
|
|
|
Reviewer for IEEE Transactions on Robotics (T-RO)
Reviewer for IEEE Robotics and Automation Letters (RA-L) Reviewer for The Conference on Robot Learning (CoRL) Reviewer for The European Conference on Computer Vision (ECCV) Reviewer for IEEE International Conference on Robotics and Automation (ICRA) Reviewer for IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) |
|
Made from Dr. Jon Barron's website design. |